我学者提出机器人触觉感知新方法
来源:科技日报 时间:2024-11-27 15:09:40
记者26日从中国科学技术大学了解到,该校副教授董二宝课题组联合香港城市大学副教授于欣格团队,提出了一种基于柔性光栅结构色的触觉感知新方法,在触觉传感器的触点定位分辨率和力识别精度等综合性能上实现了重要突破,展现出广阔的应用前景。相关研究成果日前在线发表于国际学术期刊《国家科学评论》。
触觉传感器是机器人执行复杂精细操作的关键核心部件之一。近年来,随着机器视觉技术的快速发展,基于视觉识别原理的触觉传感器(也被称为视触觉传感器)成为触觉感知领域的重要研究方向。然而,现有的视触觉传感器主要依赖几何光学信息或标记跟踪技术,其触点力位识别感知的分辨率和精度受到了严重制约。
针对这一难题,研究团队受仿生结构色现象的启发,创新性地采用柔性光栅薄膜在白光照射下形成的结构色图案作为触觉表征信息,并结合深度学习算法进行数据处理,实现了接触点的高灵敏、高分辨率感知。
实验结果表明,这种基于柔性光栅结构色的视触觉感知方法,能够充分利用结构色图案中蕴含的丰富触觉表征信息,在触点定位的空间分辨率和法向力识别精度方面显著优于当前的视触觉感知技术,并在综合性能上取得了突破性提升。
此外,基于柔性光栅结构色的触觉感知方法展现了卓越的可拓展适用性。研究团队基于核心组件的模块化设计,进一步开发了面向三种典型场景应用的传感器原型:一款高灵敏度振动传感器,能够精准检测低频振动信号;一款仿生触须传感器,能够灵敏感知低频振动和气流扰动;一套具备环向三维接触感知能力的内窥镜触觉传感系统。
研究人员介绍,这项研究成果进一步验证了该触觉感知方法在机器人感知、环境监测和医疗器械等领域的广泛应用潜力,为智能感知技术的发展提供了全新的研究思路和技术途径。
标签:
-
 江西邀跨国公司投资兴业 共享重点产业发展机遇 中新网南昌11月26日电 (记者 吴鹏泉)江西省与跨国公司投资合作对
江西邀跨国公司投资兴业 共享重点产业发展机遇 中新网南昌11月26日电 (记者 吴鹏泉)江西省与跨国公司投资合作对 -
 西平县芦庙初级中学召开期中表彰大会 2024年11月22日,西平县芦庙初级中学在操场隆重举行2024年秋季期中表彰
西平县芦庙初级中学召开期中表彰大会 2024年11月22日,西平县芦庙初级中学在操场隆重举行2024年秋季期中表彰 -
 两江新区打造千亿级空天信息产业集群 将实施七大行动 中新网重庆11月23日电 (记者 刘贤)《重庆两江新区推进空天信息产
两江新区打造千亿级空天信息产业集群 将实施七大行动 中新网重庆11月23日电 (记者 刘贤)《重庆两江新区推进空天信息产 -
 2024长江流域民间文化艺术交流展示活动将在湖北咸宁举行  湖北,承载荆楚文化的千年底蕴,融合长江流域的千里风情,孕
2024长江流域民间文化艺术交流展示活动将在湖北咸宁举行  湖北,承载荆楚文化的千年底蕴,融合长江流域的千里风情,孕 -
 社旗县法院常态化集中执行不停歇! 为切实保障胜诉当事人合法权益,有效震慑失信拒执行为,彰显司法权威,
社旗县法院常态化集中执行不停歇! 为切实保障胜诉当事人合法权益,有效震慑失信拒执行为,彰显司法权威, -
 11月22日央行开展6351亿元7天期逆回购操作 中新网11月22日电 据中国人民银行网站消息,为维护银行体系流动性
11月22日央行开展6351亿元7天期逆回购操作 中新网11月22日电 据中国人民银行网站消息,为维护银行体系流动性
- 5G-A+XR技术打造大空间多人无线互动场景 在近千平米的巨大空间内,戴上扩展现实(XR)设备,来一场沉浸感强、
- 我学者提出机器人触觉感知新方法 记者26日从中国科学技术大学了解到,该校副教授董二宝课题组联合香
-
 新一代超美小直屏OPPO Reno13系列正式发布 售价2699元起 11月25日晚,OPPO正式发布新一代科技潮品——Reno13系列。该系列延
新一代超美小直屏OPPO Reno13系列正式发布 售价2699元起 11月25日晚,OPPO正式发布新一代科技潮品——Reno13系列。该系列延 - 我国首个国家级陆相页岩油示范区年产破百万吨 来源标题:我国首个国家级陆相页岩油示范区年产破百万吨11月26日,
- 中国正能量|宓欣怡:从南非到成都的追梦之路 原本只怀揣着开设一家小小甜品店梦想的台湾青年宓欣怡,近些年不仅
- 研究认为:全球变暖改变饮食习惯 据《日本经济新闻》11月10日报道,在全球变暖对健康造成的影响方面
- 为何研制新型抗生素如此困难? 澳大利亚对话网站11月21日发表牛津大学学科带头人阿利斯泰尔·法利
- “中国天眼”发现新脉冲星超1000颗 记者26日从中国科学院国家天文台召开的FAST脉冲星科学研讨会获悉,
- 基金单位净值意思怎么解释?10份基金份额是多少股? 基金单位净值意思怎么解释?基金单位净值是指当前的基金总净资产除以
-
 算力能否像水和空气一样赋能百业? 浙江杭州宣布每年算力券总额提升至2 5亿元;内蒙古乌兰察布正打造全
算力能否像水和空气一样赋能百业? 浙江杭州宣布每年算力券总额提升至2 5亿元;内蒙古乌兰察布正打造全 - 我国将于2027年全面实现5G规模化应用 记者26日从工业和信息化部了解到,工业和信息化部等十二部门近日联
-
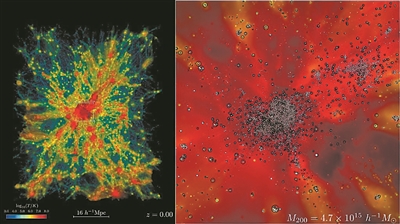 “前沿”超算实现最大规模宇宙天体物理模拟 据物理学家组织网25日报道,美国能源部阿贡国家实验室科学家,利用
“前沿”超算实现最大规模宇宙天体物理模拟 据物理学家组织网25日报道,美国能源部阿贡国家实验室科学家,利用 - 村校网课上"高速"!村校对接更多优质教育资源 5G+远程课堂在重庆渝中区人和街小学、石柱土家族自治县中益乡小学、
- 延安精神进校园主题教育活动走进北京学校 近日,北京延河弘扬延安精神基金会主办的延安精神进校园主题教育活
-
 平安健康携手业界,共探血脂报告单优化新路径 近日,在第七届中国国际进口博览会现场安进展台,平安健康医疗科技
平安健康携手业界,共探血脂报告单优化新路径 近日,在第七届中国国际进口博览会现场安进展台,平安健康医疗科技 - 安徽省跨境人民币结算金额突破2000亿元 同比增31% 随着我国外汇市场韧性稳步提升,企业汇率避险意识和能力不断增强,
- 今冬首场寒潮来袭 能源行业保供形势如何? 当前,我国北方地区已进入供暖季。中央气象台11月25日发布寒潮黄色
- “头发油得快,每天要洗头” 如何摆脱大油头? 头发油得快,每天要洗头 如何摆脱大油头?中医认为调整饮食结构、保
- 《超级飞侠》第十七季定档11月28日,恐龙世界冒险之旅即将启程 11月28日,国产幼儿动画《超级飞侠》第十七季(又名《超级飞侠17季:
- 缓解城市“停车难” 湖北今年已新增公共停车泊位14.9万个 截至今年10月,湖北省机动车保有量已达1581 1万辆、驾驶人达2074 4
- 31万人报考,导游证好考吗?一文了解关于导游的那些事儿 23日,今年的全国导游资格考试开考,报考人数大约为31万,远超去年2
- 10月份规模以上工业企业利润降幅明显收窄 国家统计局27日公布数据显示,1—10月份,全国规模以上工业企业实现
- 经销商退网不能服务断线 近期,上海、天津、重庆等地陆续曝出有4S店突然停业或者闭店,引发
- 12.5万标箱!合肥至宁波海铁联运集装箱量创新高 一列从合肥派河物流园载满白色家电产品的海铁联运班列25日抵达宁波
- 埃文·凯尔:去南京看看那段历史 才算真正完成这段旅行 11月23日,美国青年埃文·凯尔在北京接受中新社专访,向记者介绍了
-
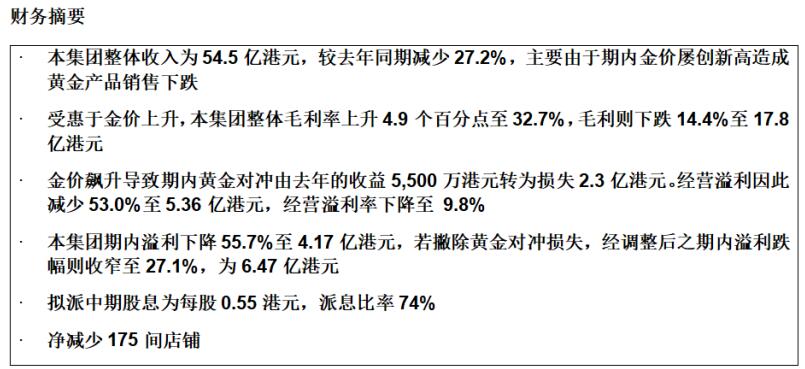 六福集团公布截至2024年9月30日止六个月之中期业绩 (2024年11月26日)─ 六福集团(国际)有限公司(本公司)董事会
六福集团公布截至2024年9月30日止六个月之中期业绩 (2024年11月26日)─ 六福集团(国际)有限公司(本公司)董事会 - 基金赎回的注意事项有哪些?基金赎回需要什么手续? 基金赎回的注意事项有哪些?1、投资者要根据相关的规章制度,按照流
- “双12购物狂欢卡”你收到过吗 “免费送礼”骗局又翻新 最近,有读者向上海辟谣平台反映,通过快递收到主题为双12购物狂欢
-
 茶叶健康与茶制品产业创新发展大会成功举办 11月23日,中国健康产业创新发展大会暨健康消费(广州)博览会在广州
茶叶健康与茶制品产业创新发展大会成功举办 11月23日,中国健康产业创新发展大会暨健康消费(广州)博览会在广州 - 【以案释法】反对家庭暴力——泌阳法院签发“人身安全保护令” 11月25日,是联合国确立的国际消除对妇女暴力日,也被称作国际消除家庭
- 特斯拉“杀价”冲刺收官 车市全年收官在即,特斯拉杀价冲刺。11月25日,特斯拉中国官宣Model
-
 邓州市召开“八大行动”暨项目推进第57次工作例会 11月26日,邓州市召开八大行动暨项目推进第57次工作例会,主要听取化纤
邓州市召开“八大行动”暨项目推进第57次工作例会 11月26日,邓州市召开八大行动暨项目推进第57次工作例会,主要听取化纤 - 西电实现防伪技术新突破 飞秒激光塑造证卡专属“指纹” 针对防伪领域的这一问题,物理不可克隆(PUF,Physical Unclonable
- 基金全部卖出后里面还显示有钱咋取出来?基金买入卖出规则是什么? 基金全部卖出后里面还显示有钱咋取出来?基金全部卖出后,如果里面还
- 民族式摔跤展现力量与美的结合 11月25日,第十二届全国少数民族传统体育运动会民族式摔跤赛场激战
- “先用后付”选择权应交给消费者 近日,一些网购平台推出的先用后付功能引发热议。这些平台将此项付
- 张湾乡协商议事提质增效 组织企业家座谈,促进吊装行业反哺家乡;完善村规民约,树立文明新风
- 河南漯河:“六职”干部你追我赶 招商引资奋楫扬帆 近日,河南省漯河市组织召开第三季度全市六职招商工作讲评会,晒出
-
 致敬30年·穿越时空颂援藏——西藏青稞酒文化高质量发展大会暨阿拉嘉宝倾心酿造10... 2024年11月24日,一场以美酒为媒、以文化为魂的盛宴在成都武侯渝江
致敬30年·穿越时空颂援藏——西藏青稞酒文化高质量发展大会暨阿拉嘉宝倾心酿造10... 2024年11月24日,一场以美酒为媒、以文化为魂的盛宴在成都武侯渝江 - 国家医保局支持生育 多地已将辅助生殖项目纳入医保 来源标题:国家医保局支持生育 多地已将辅助生殖项目纳入医保记者
- 我国将于2027年全面实现5G规模化应用 来源标题:我国将于2027年全面实现5G规模化应用记者26日从工业和信
- 兴业小区:协商共筑,健身器材迎来新生 在新南街道兴业小区的中心广场旁,一组承载着居民健康与欢笑的健身
- 本届链博会境外参展商占比升至32% 11月26日,第二届中国国际供应链促进博览会(简称链博会)在北京开幕
- 连云移动:用实际行动助力消防安全“贴心”保障 全民消防,安全至上。11月为全国消防宣传月,各行各业纷纷开展消防
- 电诈新套路盯上农村老人 电诈新套路盯上农村老人21万元取出来,警察派人上门核验现金……60
- 同兴镇:村企携手,激活乡村发展新引擎 以前一亩地一年到头累死累活赚个千把块钱,现在好了,村里把我们的
- 海州区:高端装备产业链党委,助力企业发展新征程 为深入推进产业链党建提质增效,帮助链上企业更好地把握政策机遇,
- 120不让直接进 亲属病危不让出 学校宿管该如何管? 120不让直接进 亲属病危不让出 宿舍都起火了,还让刷脸出门学校宿
- 座椅只能坐半个屁股,服务椅怎么成了“防民椅”? 躺卧座椅之不雅,较之防民椅之不雅,孰甚?近日,有老人反映长沙黄
- 座椅只能坐半个屁股,服务椅怎么成了“防民椅”? 躺卧座椅之不雅,较之防民椅之不雅,孰甚?近日,有老人反映长沙黄
热门资讯
- 平安健康携手业界,共探血脂报告单优化新路径 近日,在第七届中国国际进口博览会...
- 六福集团公布截至2024年9月30日止六个月之中期业绩 (2024年11月26日)─ 六福集团(...
- 致敬30年·穿越时空颂援藏——西藏青稞酒文化高质量发展大会暨阿拉嘉宝倾心酿造10... 2024年11月24日,一场以美酒为媒、...
-
 爱心“童”行 | 现代汽车“梦想之屋”公益活动走进武汉 - 2024年11月26日,现代汽车“梦...
爱心“童”行 | 现代汽车“梦想之屋”公益活动走进武汉 - 2024年11月26日,现代汽车“梦...
观察
图片新闻
-
 (走进中国乡村) 广西博白:一根草“编”出大产业 中新社玉林11月23日电 题:广西博...
(走进中国乡村) 广西博白:一根草“编”出大产业 中新社玉林11月23日电 题:广西博... -
 奥运冠军杜丽,有新职! 据记者了解,奥运冠军杜丽已就任国...
奥运冠军杜丽,有新职! 据记者了解,奥运冠军杜丽已就任国... -
 唐河县张店镇:巡察督办解民忧 “小事情”解决“大民生” 机井换上了新的电缆线、新电闸,俺...
唐河县张店镇:巡察督办解民忧 “小事情”解决“大民生” 机井换上了新的电缆线、新电闸,俺... -
 阿里巴巴CEO:向全球开源开放 打造繁荣的AI生态 中新网乌镇11月20日电 (奚金燕 ...
阿里巴巴CEO:向全球开源开放 打造繁荣的AI生态 中新网乌镇11月20日电 (奚金燕 ...
精彩新闻
-
 天涯共此时 民族大联欢 中新网三亚11月27日电 题:天涯共...
天涯共此时 民族大联欢 中新网三亚11月27日电 题:天涯共... - 天涯共此时 民族大联欢 中新网三亚11月27日电 题:天涯共...
- 崇川:“温暖秋冬”的科技启蒙之旅 11月23日下午,崇川经济开发区观畅...
- 座椅只能坐半个屁股,服务椅怎么成了“防民椅”? 躺卧座椅之不雅,较之防民椅之不雅...
- 秦灶街道:“小”处着手,开创基层治理“大”格局 近年来,秦灶街道积极探索党建引领...
- 秦灶街道:以“小”谋“大”,探索党建引领基层治理新路径 近年来,秦灶街道积极探索党建引领...
- 爱心“童”行 | 现代汽车“梦想之屋”公益活动走进武汉 - 2024年11月26日,现代汽车“梦...
- 崇川:党旗引领科技路,童心绽放科学花 11月23日下午,崇川经济开发区观畅...
- 秦灶街道:从“小”出发,打造基层治理“大”成效 近年来,秦灶街道积极探索党建引领...
- 天涯共此时 民族大联欢 中新网三亚11月27日电 题:天涯共...
- 徐州经开区徐庄镇:全力修复破损路面,办好民生实事 为做好民生实事,解决群众急难愁盼...
-
 中国百名油画家走进福建宁德:共绘山海宁德、多彩蕉城 中新网宁德11月27日电 (林榕生)26...
中国百名油画家走进福建宁德:共绘山海宁德、多彩蕉城 中新网宁德11月27日电 (林榕生)26... - 通州法院:破解彩礼难题,构建和谐婚姻 近日,南通通州法院为倡导文明婚俗...
- 崇川区费桥村:温暖秋冬,情系残疾群体 寒意渐生,温暖不停。11月25日,崇...
- 费桥村:“文明实践 温暖秋冬”,爱心传递不停歇 寒意渐生,温暖不停。11月25日,崇...
-
 邓州市杏山区人大代表:筑牢校园“安全墙” 11月25日上午,邓州市杏山区人大代...
邓州市杏山区人大代表:筑牢校园“安全墙” 11月25日上午,邓州市杏山区人大代... -
 用户至上 美丽显示|大国品牌强力巨彩,有你更精彩! 2024年是强力巨彩迎来品牌成立20周...
用户至上 美丽显示|大国品牌强力巨彩,有你更精彩! 2024年是强力巨彩迎来品牌成立20周... -
 豫坡集团举行消防安全培训演练 11月26日,为了提高全体员工的消防...
豫坡集团举行消防安全培训演练 11月26日,为了提高全体员工的消防... - 新能源车时刻收集数据,车主隐私如何保护? 来源标题:新能源车时刻收集数据,...
- 新野县法院:打造一站式诉讼服务中心 便民利民落实处 近年来,河南省南阳市新野县人民法...
-
 河南社旗:一年三季豆 促产业振兴 王贤一是河南省社旗县太和镇第十二...
河南社旗:一年三季豆 促产业振兴 王贤一是河南省社旗县太和镇第十二... - “代炒菜”悄然走红 在消费分层中把握机遇 在消费分层中把握机遇(评论员观察)...
-
 南阳市宛城区法院谱写枫桥式人民法庭新篇章 人民法庭作为法院系统的神经末梢,...
南阳市宛城区法院谱写枫桥式人民法庭新篇章 人民法庭作为法院系统的神经末梢,... -
 西平县妇幼保健院举办社会心理服务主题日活动 为进一步推进社会心理服务工作机制...
西平县妇幼保健院举办社会心理服务主题日活动 为进一步推进社会心理服务工作机制... - 全链条节约粮食,我们该如何行动? 新闻1+1丨全链条节约粮食,我们该...
- 全链条节约粮食,我们该如何行动? 新闻1+1丨全链条节约粮食,我们该...
- 年轻人流行租轮椅游上海迪士尼?轮椅扎堆引网友热议 年轻人流行租轮椅游上海迪士尼?轮...
- 银行迎战2025年“开门红”:策略调整与业绩压力并存 一年有五六个月时间都在开门红。近...
- 砥洎城为什么被称为“铜墙铁壁”? 砥洎城,以水岸城堡、坩埚铁城、蜂...
- 前三季度冷链物流总额达6.40万亿元 同比增长4.2% 本报北京11月26日电 (记者欧阳洁)...
-
 云听“听见·文学中国”上新第十一届茅盾文学奖作品系列 茅盾文学奖作为我国文学界最高荣誉...
云听“听见·文学中国”上新第十一届茅盾文学奖作品系列 茅盾文学奖作为我国文学界最高荣誉... - 前三季度冷链物流总额达6.40万亿元 同比增长4.2% 本报北京11月26日电 (记者欧阳洁)...
- 银行迎战2025年“开门红”:策略调整与业绩压力并存 一年有五六个月时间都在开门红。近...
- 市场监管总局:前三季度我国广告业保持较快增长 中新网11月27日电 据市说新语微信...
- 前三季度冷链物流总额达6.40万亿元 同比增长4.2% 本报北京11月26日电 (记者欧阳洁)...
- 市场监管总局:前三季度我国广告业保持较快增长 中新网11月27日电 据市说新语微信...
- 广西崇左多举措助推中越贸易畅通 【东盟专线】广西崇左多举措助推中...
- 医保部门多措并举支持生育 助力政策体系不断完善 来源标题:医保部门多措并举支持生...
- “上海价格”登场全球产业链 逐步扩大国际影响力 上海价格登场全球产业链在全球大宗...
- 广西崇左多举措助推中越贸易畅通 【东盟专线】广西崇左多举措助推中...
- “上海价格”登场全球产业链 逐步扩大国际影响力 上海价格登场全球产业链在全球大宗...
-
 西平柏城三里湾小学开展口卡口页比赛活动 以赛促学,以赛促减。为进一步落实...
西平柏城三里湾小学开展口卡口页比赛活动 以赛促学,以赛促减。为进一步落实... - 广西崇左多举措助推中越贸易畅通 【东盟专线】广西崇左多举措助推中...
- 前三季度冷链物流总额达6.40万亿元 同比增长4.2% 本报北京11月26日电 (记者欧阳洁)...
- 医生提醒:心衰需加强自我管理 早发现早治疗 来源标题:医生提醒:心衰需加强自...
- 3000多米地下,年产百万吨页岩油怎么压出来 尘封2 5亿年,13年艰难解锁3000多...
-
 西平县柏苑王店小学:语文课堂融思政 立德树人促成长 培养什么人?怎样培养人?为谁培养...
西平县柏苑王店小学:语文课堂融思政 立德树人促成长 培养什么人?怎样培养人?为谁培养... - 3000多米地下,年产百万吨页岩油怎么压出来 尘封2 5亿年,13年艰难解锁3000多...
- 银行迎战2025年“开门红”:策略调整与业绩压力并存 一年有五六个月时间都在开门红。近...
-
 西平县安防办、总工会联合开展“全民消防 生命至上”119消防宣传月活动 为积极响应第33个全国119消防月,...
西平县安防办、总工会联合开展“全民消防 生命至上”119消防宣传月活动 为积极响应第33个全国119消防月,...